Strike and Dip Part IX
This post was originally published on April 14, 2018 at https://sparklechicken.net/channel/jakessbc
Well, it’s been a while since I did any updates to the page. That said, I’ve made some changes to the unit and my workflow.
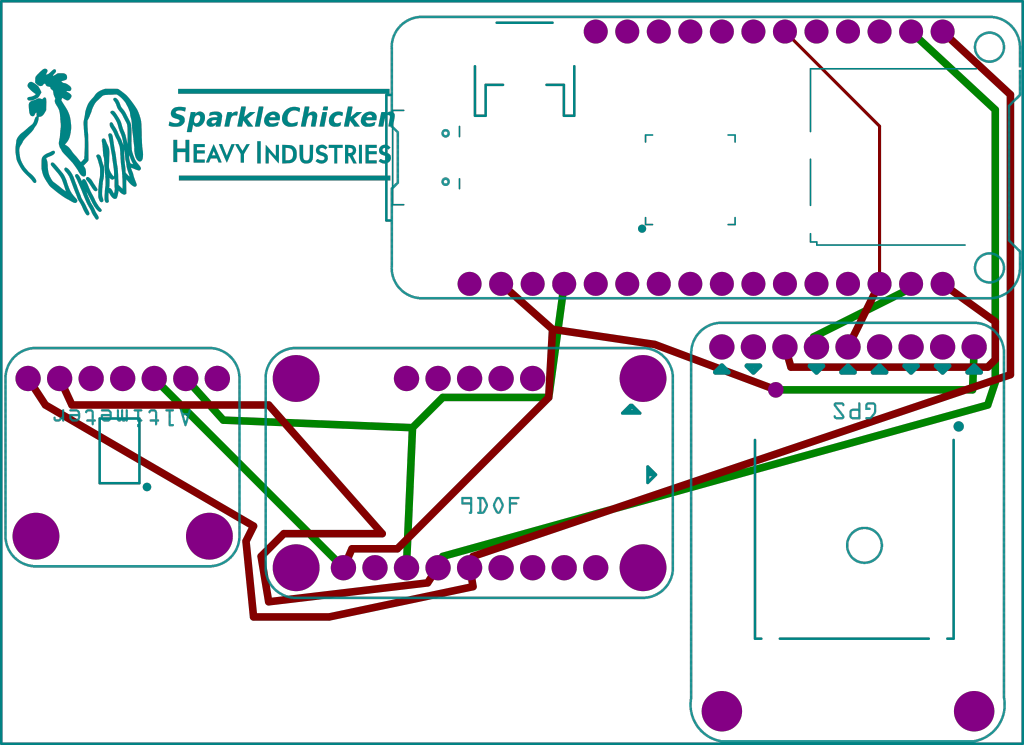
The biggest news is that I’m finally learning git! I’m JakeSparkleChicken on GitHub, and have been moving all of my project files over there. Right now, the StrikeDipC project has the code, the Fritzing image, the BOM, and all of the Gerber files for the custom PCB (such as it is). Since the board is designed to work with the breakout boards, there are only 13 traces total, and the only real reasons to spend the money on the PCBs is to say that I did it, and to have the SparkleChicken Heavy Industries logo silkscreened on it. For me, that’s worth the $40 it will take to get them made through OSHPark, but I doubt that it would be worth it to anyone else following along.
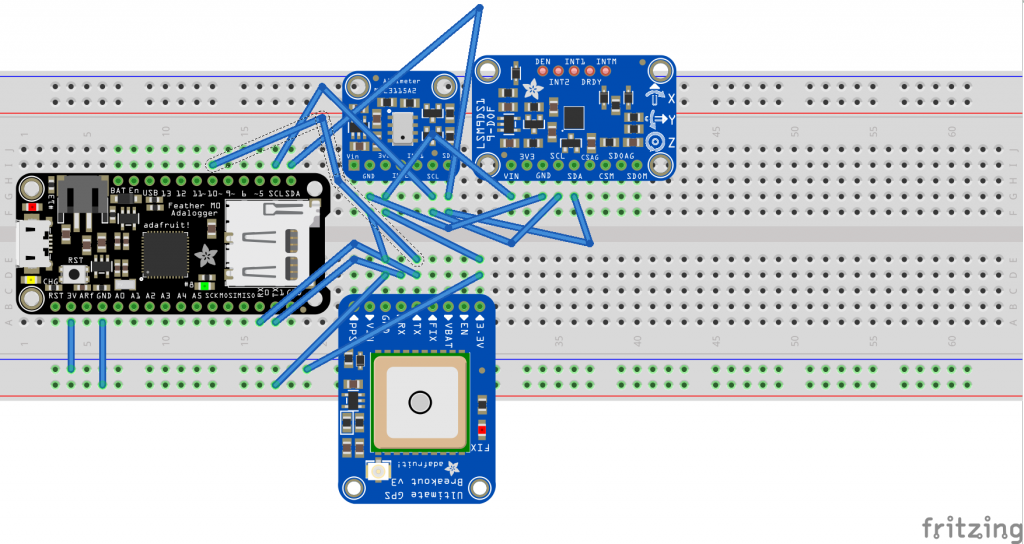
The current BOM includes:
- Adafruit Feather M0 Adalogger
- Adafruit OLED Featherwing
- Adafruit Ultimate GPS v3
- Adafruit MPL3115A2 Altimeter
- Adafruit LSM9DS1 9DoF Breakout
This is the current POC on the breadboard:
Here’s a picture of the board:
The code is currently under-commented, and still mostly copy and pasted from example code. I did learn how to implement a hardware interrupt, and now the GPS USART transmit is driving the timing. This should fix the issue with the GPS only updating randomly, but it is cold, windy, cloudy and rainy today, so I don’t think that I’ll be going outside to test it for a few days.
#define Serial SERIAL_PORT_USBVIRTUAL
#include <Adafruit_MPL3115A2.h> //Pressure+Temp library
#include <Wire.h> //I2C library for sensors
#include <Arduino.h>
#include "wiring_private.h"
#include <Adafruit_Sensor.h> //Adafruit integrated sensor library
#include <Adafruit_LSM303_U.h> //Accel + Mag library
#include <Adafruit_L3GD20_U.h> //Gyro library
#include <Adafruit_9DOF.h> //Integrated IMU library
#include <Adafruit_SSD1306.h> //Adafruit OLED library
#include <Adafruit_GFX.h> // Core graphics library
#include <gfxfont.h> //Core font library
#include <Adafruit_GPS.h> //GPS library
#include <SPI.h> //Used for SD Card
#include <SD.h> //SD Card library
#include <Adafruit_FeatherOLED.h> //Additional Adafruit drivers for display
const int chipSelect = 4; //CS for built in SD card reader on Adalogger
#define BUTTON_A 9
#define BUTTON_B 6
#define BUTTON_C 5
#define LED 13
/* Assign a unique ID to the sensors and display*/
Adafruit_9DOF dof = Adafruit_9DOF();
Adafruit_LSM303_Accel_Unified accel = Adafruit_LSM303_Accel_Unified(30301);
Adafruit_LSM303_Mag_Unified mag = Adafruit_LSM303_Mag_Unified(30302);
Adafruit_MPL3115A2 baro = Adafruit_MPL3115A2();
Adafruit_SSD1306 display = Adafruit_SSD1306();
float adjHeading = 0;
float dip = 0;
float lon = 0;
float lat = 0;
float alt = 0;
int prevButton = 0; //Needed for state preservation
bool Fix = 1; //between button reads
Adafruit_GPS GPS(&Serial1); //GPS communicates with Feather M0
//via Serial
//uint32_t timer = millis();
volatile static bool triggered;
/* Initialize sensors */
void initSensors() {
if(!accel.begin())
{
display.print(F("No LSM303 detected"));
while(1);
}
if(!mag.begin())
{
display.print("No LSM303 detected");
while(1);
}
if (! baro.begin()) {
display.print("No MPL3115A2 detected");
return;
}
}
void setup(void) {
initSensors(); //Initialize sensors
//uint16_t time = millis();
//time = millis() - time;
display.begin(SSD1306_SWITCHCAPVCC, 0x3C); //Initialize display
display.display();
delay(1000);
display.clearDisplay();
display.setTextSize(1);
display.setTextColor(WHITE);
display.setCursor(0,0);
display.println("SparkleChicken");
display.println("HeavyIndustries");
delay(1000);
display.display();
Serial.begin(115200);
GPS.begin(9600); //Set baud for Serial
/* Set limited data from GPS and refresh rate */
GPS.sendCommand(PMTK_SET_NMEA_OUTPUT_RMCONLY);
GPS.sendCommand(PMTK_SET_NMEA_UPDATE_10HZ);
//useInterrupt(true);
delay(1000);
pinMode(10,INPUT);
attachInterrupt(10,ISR,FALLING);
}
void loop(void)
{
//GPS.read();
//if (GPS.newNMEAreceived()) {
//Serial.println(GPS.lastNMEA()); // this also sets the newNMEAreceived() flag to false
//if (!GPS.parse(GPS.lastNMEA())) // this also sets the newNMEAreceived() flag to false
//return; // we can fail to parse a sentence in which case we should just wait for another
//}
//readSensors();
//displayInfo();
//if (!digitalRead(BUTTON_A)){
// writeData();
//}
if(triggered){
readSensors();
displayInfo();
if (!digitalRead(BUTTON_A)){
writeData();
}
triggered = false; // reset flag
attachInterrupt(10,ISR,FALLING); // enable interrupt for next serial activity
}
}
void ISR(){
detachInterrupt(10);// else interrupt would trigger for every bit of RS232 Transmision
triggered=true;
GPS.read();
}
void displayInfo()
{
display.clearDisplay();
display.setTextSize(1);
display.setTextColor(WHITE);
display.setCursor(0,0);
display.print("Lat: ");
display.print(GPS.latitudeDegrees, 4);
display.println(" ");
display.print("Lon: ");
display.print(GPS.longitudeDegrees, 4);
display.println(" ");
display.print("D:");
display.print(dip);
display.print(" ");
display.print("S:");
display.print(adjHeading);
display.println(" ");
display.print("A:");
display.print(alt);
display.print(" Fix: ");
display.print(GPS.fix);
display.display();
//delay(100);
}
void readSensors()
{
if (GPS.newNMEAreceived()) {
Serial.println(GPS.lastNMEA()); // this also sets the newNMEAreceived() flag to false
if (!GPS.parse(GPS.lastNMEA())) // this also sets the newNMEAreceived() flag to false
return; // we can fail to parse a sentence in which case we should just wait for another
}
sensors_event_t accel_event;
sensors_event_t mag_event;
sensors_vec_t orientation;
/* Calculate pitch and roll from the raw accelerometer data
and calculate heading from magnetometer*/
accel.getEvent(&accel_event);
mag.getEvent(&mag_event);
if (dof.fusionGetOrientation(&accel_event, &mag_event, &orientation))
{
dip = abs(orientation.roll);
alt = baro.getAltitude();
}
if (orientation.heading < 0)
{
adjHeading = abs(orientation.heading);
}
else{
adjHeading = 360 - orientation.heading;
}
}
void writeData() {
if (!SD.begin(chipSelect)) {
display.clearDisplay();
display.setCursor(0,0);
display.println("Card init. failed!");
display.display();
delay(2000);
}
File dataFile = SD.open("datalog.txt", FILE_WRITE);
// if the file is available, write to it:
if (dataFile) {
display.clearDisplay();
display.setCursor(0,0);
display.println("Writing...");
display.display();
dataFile.print(GPS.year);
dataFile.print(",");
dataFile.print(GPS.month);
dataFile.print(",");
dataFile.print(GPS.day);
dataFile.print(",");
dataFile.print(GPS.hour);
dataFile.print(",");
dataFile.print(GPS.minute);
dataFile.print(",");
dataFile.print(GPS.seconds);
dataFile.print(",");
dataFile.print(GPS.latitudeDegrees);
dataFile.print(",");
dataFile.print(GPS.longitudeDegrees);
dataFile.print(",");
dataFile.print(alt);
dataFile.print(",");
dataFile.print(dip);
dataFile.print(",");
dataFile.println(adjHeading);
dataFile.close();
delay(1000);
}
// if the file isn't open, pop up an error:
else {
display.clearDisplay();
display.setCursor(0,0);
display.println("Can't open file!");
display.display();
delay(2000);
}
}
About Author
JAKE MOOMAW
Jake is a network and systems admin in the Chicago area, where he lives with his very understanding wife and very stinky cat.